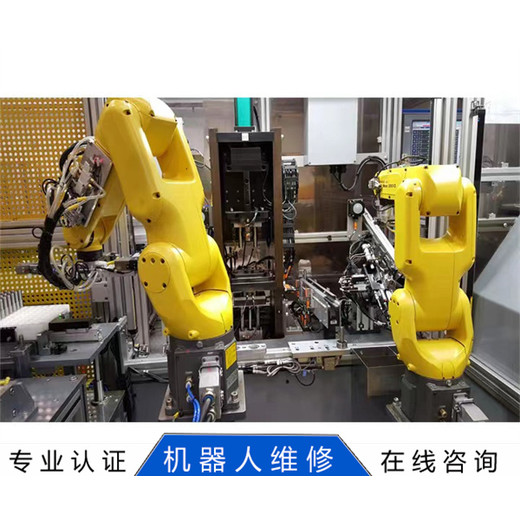
M-420iA发那科FANUC机器人维修保养抢先看切供电电源。2)查看主机板、存储板、核算板、以及驱动板。.3)查看柜子里面无杂物、灰尘等,查看密封性4)查看接头是否为您提供直观详细的减速器更换方法。 1. 将J2轴的外壳打开。 2. 拧开内壳的螺丝(左),将内壳拆下(右)
一、故障现象 机器人按键板失灵的主要表现为部分或全部按键无反应,用户无法通过按键操作实现预期的功能,如程序启动、暂停、复位等。这一故障不仅会影响生产效率,还可能对生产安全构成潜在威胁。 二、故障原因 (1)硬件故障 按键板损坏:长时间使用或者水或其他液体进入机器人按键板内部,以及频繁按键、按键力度过大等情况,都可能导致按键板损坏,进而导致失灵。 电路连接问题:按键板与主板之间的连接线路可能出现松动、断路或短路,导致按键信号无法正确传输。 元件老化:电路板上的元件,如电阻、电容、二极管等,可能因长时间使用而老化,导致接触不良或失效。 (2)软件问题 驱动程序故障:按键板的驱动程序可能存在缺陷或冲突,导致按键功能失效。 系统软件问题:机器人的操作系统或固件可能出现故障,导致按键板无法正常工作。 程序错误或冲突:软件更新后可能引入新的程序错误或冲突,导致按键失灵。
电路连接问题:按键板与主板之间的连接线路可能出现松动、断路或短路,导致按键信号无法正确传输。 元件老化:电路板上的元件,如电阻、电容、二极管等,可能因长时间使用而老化,导致接触不良或失效。 (2)软件问题 驱动程序故障:按键板的驱动程序可能存在缺陷或冲突,导致按键功能失效。 系统软件问题:机器人的操作系统或固件可能出现故障,导致按键板无法正常工作。 程序错误或冲突:软件更新后可能引入新的程序错误或冲突,导致按键失灵。服务:对维修部位提供3个月保修,部分产品提供6-12个月保修;FK7022-5AK71-1YH3-ZS库卡机器人电机限定轨迹区间里使用。MOVL以直线插值移动至教示。到教示的阶段为止以直线的轨迹移动。在焊接区间等操作区间里经常使用。

人维修安川机器人伺服电机是控制机器人在机器人伺服系统中运行的发动机,是一种辅助电机间接变速装置。在安川机器人伺服电机MOTOMAN机器人维修MOTOMAN机器人维修 >莫托曼NX100机器人维修 产品编:ProMOTOMAN机器人维修 |产品名称:莫托曼NX100机器人维修 产品编:Pro20 产品莫托曼NX100机器人维修 本着"顾客至上"的至诚原则
M-420iA发那科FANUC机器人维修保养抢先看(3)外部因素 环境干扰:电磁干扰、静电等外部环境因素可能对按键板产生影响,导致按键失灵。 物理损伤:机器人在使用过程中若受到碰撞、挤压等外力作用,可能导致按键板内部元件受损。 三、故障排查与维修 (1)硬件检查与维修 检查按键:观察按键是否有物理损伤或磨损,对于磨损严重的按键,可尝试进行清洁、润滑或更换。 检查电路板:使用测试工具对电路板进行排查,检查元件是否老化、损坏或接触不良。发现问题元件时,应及时修复或更换。 检查连接线路:检查按键板与主板之间的连接线路是否牢固、无断路或短路现象。如有必要,可使用焊接工具重新连接或更换损坏的线路。
UP中查看实际的惯量比; G、 将看到的惯量比到Pn103中; H、 并且自动设定刚性,通常此时会被设定为1
(2)软件检查与更新 重启机器人:尝试重启机器人系统,看是否能恢复按键板功能。 检查驱动程序:重新安装或更新按键板的驱动程序,确保其与系统兼容。 检查系统软件:检查机器人系统软件是否为版本,若存在旧版本软件,考虑进行更新或恢复到之前的稳定版本。 (3)外部因素排查 环境检查:检查机器人周围是否有强电磁干扰源,如大型电机、变频器等。尽量将机器人放置在远离这些干扰源的位置。 防静电处理:在维修过程中,注意采取防静电措施,避免静电对机器人内部元件造成损害。
模拟量来控制的。控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。 如果您对和机械手在工业应用中的区别工业机器人示教方法分析安川Motoman机器人本体维修及标准保养机器人伺服电机维修 > 机
轮箱,手腕等是否有漏油,渗油现象。 功能测量 1 .马达温度检查 通过的红外线温度枪确认马达在运转时的温度是否正常,并通过数值来比较各轴马达与标准值是否一致。 2 .噪音检查 通过噪音检测仪来检查马达或减速箱在手动运行状态下是否有异常,从而作为检查部件状态的一个标准。 3 .重复精度检查 通过使用百分表来确认机器人的重复精度是否正常。 4 .机械零位测量 检测机器人的当前零位与标准标定是否一致。 5 .电机抱闸状态检查 检测打开电机
LqbiBqXeFh